Research Progress
-
 A new approach to regularity structures is developed and applied in the context of quasi-linear singular SPDEs. Renormalization counter-terms are identified and a priori estimates are obtained in the full sub-critical regime of roughness of the noise. In a separate expository note, we also give a short and accessible proof of a key ingredient for the a priori bounds: a generalized Schauder type estimate used in the analysis of the SPDE.Publication:1. Felix Otto, Jonas Sauer, Scott A. Smith, Hendrik Weber, A priori bounds for quasi-linear SPDEs in the full subcritical regime. Journal of the European Mathematical Society 27 (2025), no. 1, pp. 71–1182. Jonas Sauer, Scott A. Smith, Schauder estimates for germs by scaling. Stochastic PDE:Analysis and Computations, Special Issue In Memory of Giuseppe Da Prato (2025)Author:Felix OttoMax Planck Institute for Mathematics in the Sciences, 04103 Leipzig, Germanyfelix.otto@mis.mpg.deJonas SauerFaculty of Mathematics and Computer Science, Friedrich-Schiller-Universität Jena, 07737 Jena, Germanyjonas.sauer@uni-jena.deScott A. Smith (corresponding author)Institute of Applied Mathematics, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, 100190 Beijing, P. R. China;ssmith@amss.ac.cnHendrik WeberFaculty of Mathematics and Computer Science, Westfälische Wilhelms-Universität Münster, 48149 Münster, Germanyhendrik.weber@uni-muenster.de
A new approach to regularity structures is developed and applied in the context of quasi-linear singular SPDEs. Renormalization counter-terms are identified and a priori estimates are obtained in the full sub-critical regime of roughness of the noise. In a separate expository note, we also give a short and accessible proof of a key ingredient for the a priori bounds: a generalized Schauder type estimate used in the analysis of the SPDE.Publication:1. Felix Otto, Jonas Sauer, Scott A. Smith, Hendrik Weber, A priori bounds for quasi-linear SPDEs in the full subcritical regime. Journal of the European Mathematical Society 27 (2025), no. 1, pp. 71–1182. Jonas Sauer, Scott A. Smith, Schauder estimates for germs by scaling. Stochastic PDE:Analysis and Computations, Special Issue In Memory of Giuseppe Da Prato (2025)Author:Felix OttoMax Planck Institute for Mathematics in the Sciences, 04103 Leipzig, Germanyfelix.otto@mis.mpg.deJonas SauerFaculty of Mathematics and Computer Science, Friedrich-Schiller-Universität Jena, 07737 Jena, Germanyjonas.sauer@uni-jena.deScott A. Smith (corresponding author)Institute of Applied Mathematics, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, 100190 Beijing, P. R. China;ssmith@amss.ac.cnHendrik WeberFaculty of Mathematics and Computer Science, Westfälische Wilhelms-Universität Münster, 48149 Münster, Germanyhendrik.weber@uni-muenster.de -
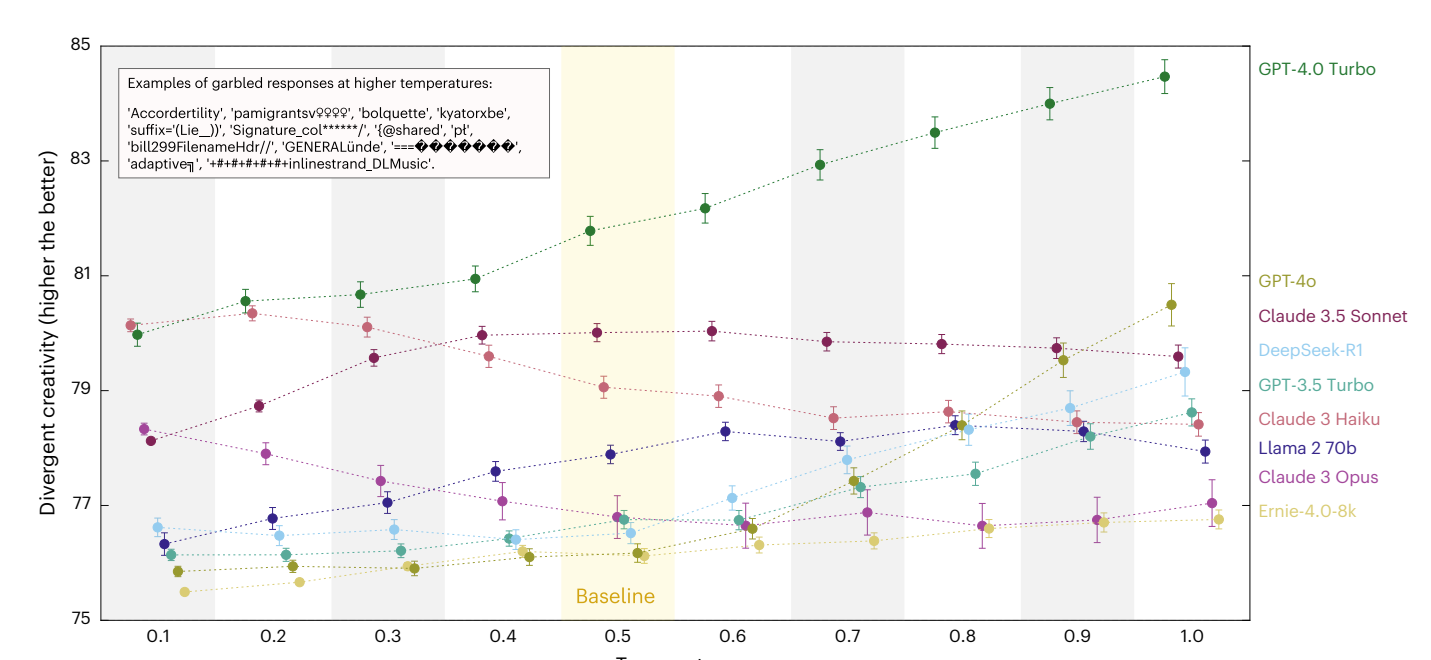 The rapid advancement of Large Language Models (LLMs) has sparked intense debate regarding their capacity to replicate or surpass human creativity, yet systematic comparisons of their divergent thinking abilities remain scarce. This study addresses this gap by conducting a large-scale evaluation of divergent creativity, analyzing responses from 9,198 humans and 215,542 observations across various LLMs using the Divergent Association Task (DAT). Our results indicate that while the average creativity scores of humans and AI are comparable, humans exhibit significantly greater variability and linguistic diversity, with top-tier human performers consistently outscoring even the most advanced models like GPT-4 and DeepSeek. The research further reveals critical limitations in current AI capabilities; specifically, prompting strategies designed to simulate "genius" personas or specific demographics failed to reliably enhance creativity and often produced results contrary to empirical human patterns. Moreover, attempts to increase model creativity by adjusting temperature parameters resulted in a trade-off between novelty and semantic coherence, eventually leading to nonsensical outputs. These findings suggest that LLMs currently function best as tools for augmentation rather than replacement, as they lack the unique, experiential cognition that drives expert-level human innovation. This study refines our understanding of the distinct boundaries between biological and artificial creativity, underscoring the necessity of human-in-the-loop approaches for high-stakes creative problem-solving. Publication:Nature Human Behaviourhttps://doi.org/10.1038/s41562-025-02331-1 Author:Difang HuangAcademy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, China
The rapid advancement of Large Language Models (LLMs) has sparked intense debate regarding their capacity to replicate or surpass human creativity, yet systematic comparisons of their divergent thinking abilities remain scarce. This study addresses this gap by conducting a large-scale evaluation of divergent creativity, analyzing responses from 9,198 humans and 215,542 observations across various LLMs using the Divergent Association Task (DAT). Our results indicate that while the average creativity scores of humans and AI are comparable, humans exhibit significantly greater variability and linguistic diversity, with top-tier human performers consistently outscoring even the most advanced models like GPT-4 and DeepSeek. The research further reveals critical limitations in current AI capabilities; specifically, prompting strategies designed to simulate "genius" personas or specific demographics failed to reliably enhance creativity and often produced results contrary to empirical human patterns. Moreover, attempts to increase model creativity by adjusting temperature parameters resulted in a trade-off between novelty and semantic coherence, eventually leading to nonsensical outputs. These findings suggest that LLMs currently function best as tools for augmentation rather than replacement, as they lack the unique, experiential cognition that drives expert-level human innovation. This study refines our understanding of the distinct boundaries between biological and artificial creativity, underscoring the necessity of human-in-the-loop approaches for high-stakes creative problem-solving. Publication:Nature Human Behaviourhttps://doi.org/10.1038/s41562-025-02331-1 Author:Difang HuangAcademy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, China -
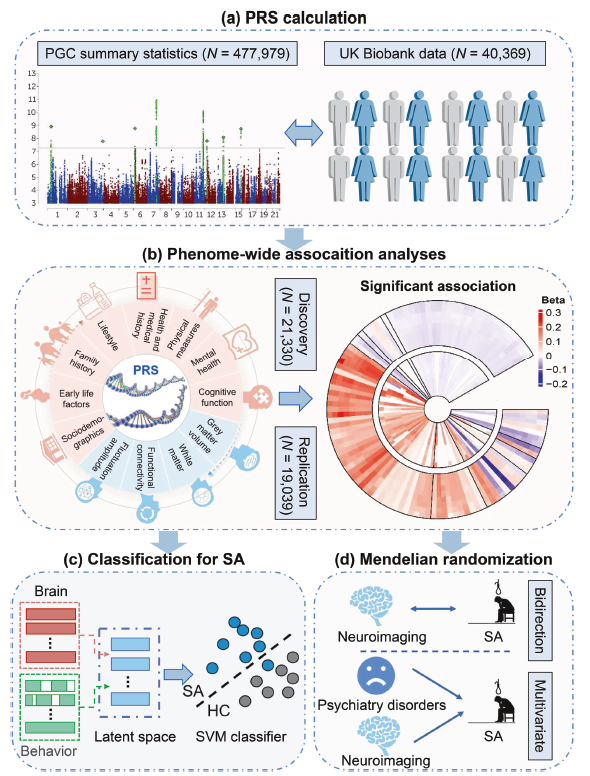 Uncertainties persist in the neurological and behavioral risk factors for suicide attempt (SA) due to a lack of data covering multiple phenotypes. Here, the polygenic risk scores (PRSs) for SA samples within the UK Biobank (N = 40,369) were estimated using non-overlapping Psychiatric Genomics Consortium datasets as a reference. A total of 70 PRS-associated phenotypes encompassing discovered and never-reported phenotypes were identified, thereby facilitating applications in SA identification (area under the curve of 84%). Different with the existing observational studies, the causal effects between brain and SA were explored. Mendelian randomization supported a potential causal effect of right hippocampal gray matter volume on SA, whereas SA had a reverse causal effect on the VI cerebellum. After controlling for the effects of psychiatric disorders, the right hippocampus still had an independent causal effect on SA. These findings provide multi-perspective evidence for early understanding and identification of SA and shed new lights for causal inference between brain and SA.Publication:MOLECULAR PSYCHIATRYhttp://dx.doi.org/10.1038/s41380-025-03214-7Author:Wenliang PanState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, China.E-mail addresses: panwliang@amss.ac.cn
Uncertainties persist in the neurological and behavioral risk factors for suicide attempt (SA) due to a lack of data covering multiple phenotypes. Here, the polygenic risk scores (PRSs) for SA samples within the UK Biobank (N = 40,369) were estimated using non-overlapping Psychiatric Genomics Consortium datasets as a reference. A total of 70 PRS-associated phenotypes encompassing discovered and never-reported phenotypes were identified, thereby facilitating applications in SA identification (area under the curve of 84%). Different with the existing observational studies, the causal effects between brain and SA were explored. Mendelian randomization supported a potential causal effect of right hippocampal gray matter volume on SA, whereas SA had a reverse causal effect on the VI cerebellum. After controlling for the effects of psychiatric disorders, the right hippocampus still had an independent causal effect on SA. These findings provide multi-perspective evidence for early understanding and identification of SA and shed new lights for causal inference between brain and SA.Publication:MOLECULAR PSYCHIATRYhttp://dx.doi.org/10.1038/s41380-025-03214-7Author:Wenliang PanState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, China.E-mail addresses: panwliang@amss.ac.cn -
GRASSMANNIAN OPTIMIZATION IS NP-HARD (Ye, Ke)
05 21, 2026
We show that unconstrained quadratic optimization over a Grassmannian Gr(k, n) is NP-hard. Our results cover all scenarios: (i) when k and n are both allowed to grow, (ii) when k is arbitrary but fixed, and (iii) when k is fixed at its lowest possible value 1. We then deduce the NP-hardness of unconstrained cubic optimization over the Stiefel manifold V(k, n) and the orthogonal group O(n). As an addendum we demonstrate the NP-hardness of unconstrained quadratic optimization over the Cartan manifold, i.e., the positive definite cone \BbbS n ++ regarded as a Riemannian manifold, another popular example in manifold optimization. We will also establish the nonexistence of FPTAS in all cases.Publication:SIAM JOURNAL ON OPTIMIZATIONhttp://dx.doi.org/10.1137/24M1672596Author:KE YEState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, Chinakeyk@amss.ac.cn -
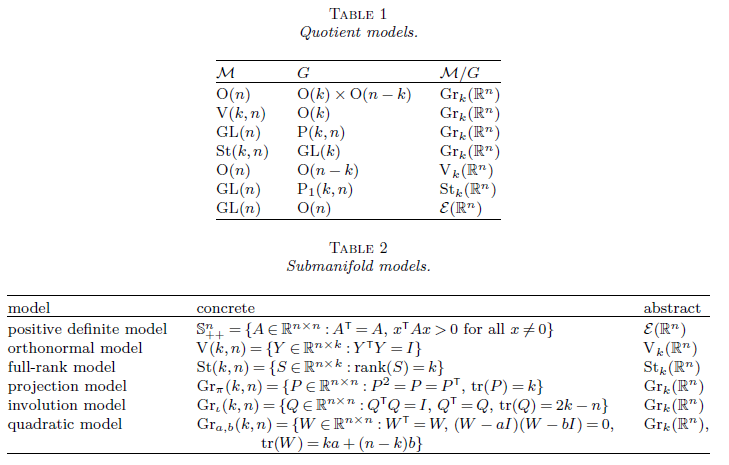
 The degree of the Grassmannian with respect to the Pl & uuml;cker embedding is well-known. However, the Pl & uuml;cker embedding, while ubiquitous in pure mathematics, is almost never used in applied mathematics. In applied mathematics, the Grassmannian is usually embedded as projection matrices Gr(k, R' ) =similar to {P is an element of R'x' :PT = P = P2, tr(P) = k} or as involution matrices Gr(k,R') =similar to {X is an element of R'x' : XT = X, X2 = I, tr(X) = 2k-n}. We will determine an explicit expression for the degree of the Grassmannian with respect to these embeddings. In so doing, we resolved a conjecture of Devriendt, Friedman, Reinke, and Sturmfels about the degree of Gr(2, R') and in fact generalized it to Gr(k, R'). We also proved a set-theoretic variant of another conjecture of theirs about the limit of Gr(k,R') in the sense of Gr & ouml;bner degeneration. (c) 2025 Elsevier Inc. All rights are reserved, including those for text and data mining, AI training, and similar technologies.Publication:ADVANCES IN MATHEMATICShttp://dx.doi.org/10.1016/j.aim.2025.110459Author:Lek-Heng LimComputational and Applied Mathematics Initiative, Department of Statistics, University of Chicago, Chicago, IL 60637-1514, United States of AmericaE-mail addresses: lekheng@uchicago.eduKe YeState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, ChinaCorresponding authorE-mail addresses: keyk@amss.ac.cn
The degree of the Grassmannian with respect to the Pl & uuml;cker embedding is well-known. However, the Pl & uuml;cker embedding, while ubiquitous in pure mathematics, is almost never used in applied mathematics. In applied mathematics, the Grassmannian is usually embedded as projection matrices Gr(k, R' ) =similar to {P is an element of R'x' :PT = P = P2, tr(P) = k} or as involution matrices Gr(k,R') =similar to {X is an element of R'x' : XT = X, X2 = I, tr(X) = 2k-n}. We will determine an explicit expression for the degree of the Grassmannian with respect to these embeddings. In so doing, we resolved a conjecture of Devriendt, Friedman, Reinke, and Sturmfels about the degree of Gr(2, R') and in fact generalized it to Gr(k, R'). We also proved a set-theoretic variant of another conjecture of theirs about the limit of Gr(k,R') in the sense of Gr & ouml;bner degeneration. (c) 2025 Elsevier Inc. All rights are reserved, including those for text and data mining, AI training, and similar technologies.Publication:ADVANCES IN MATHEMATICShttp://dx.doi.org/10.1016/j.aim.2025.110459Author:Lek-Heng LimComputational and Applied Mathematics Initiative, Department of Statistics, University of Chicago, Chicago, IL 60637-1514, United States of AmericaE-mail addresses: lekheng@uchicago.eduKe YeState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, ChinaCorresponding authorE-mail addresses: keyk@amss.ac.cn -
Non-local operators with low singularity kernels regularity estimates and martingale problem (Guohuan Zhao)
05 21, 2026
We consider the linear non-local operator L denoted by Lu(x) = ∫Rd (u(x + z) − u(x)) a(x, z)J(z) dz. Here a(x, z) is bounded and J(z) is the jump kernel of a Lévy process, which only has a low-order singularity near the origin and does not allow for standard scaling. The aim of this work is twofold. Firstly, we introduce generalized Orlicz–Besov spaces tailored to accommodate the analysis of elliptic equations associated with L, and establish regularity results for the solutions of such equations in these spaces. Secondly, we investigate the martingale problem associated with L. By utilizing analytic results, we prove the well-posedness of the martingale problem under mild conditions. Finally, we obtain a new Krylov-type estimate for the martingale solution through the use of a Morrey-type inequality for generalized Orlicz–Besov spaces.Publication:Mathematische Annalen (2025) 393:1881–1937https://doi.org/10.1007/s00208-025-03199-2Author:Guohuan ZhaoSKLMS, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, Chinagzhao@amss.ac.cnEryan HuCenter for Applied Mathematics and KL-AAGDM, Tianjin University, Tianjin 300072, Chinaeryan.hu@tju.edu.cn -
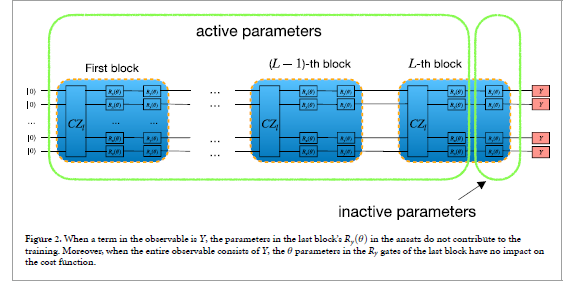 Variational quantum algorithms are among the most prominent methods in quantum computing,with applications in quantum machine learning, quantum simulation, and related fields. However,as the number of qubits grows, these algorithms often encounter the barren-plateau phenomenon,which severely limits their scalability. In this work, we introduce a novel parameter-initializationstrategy based on Gaussian mixture models. We rigorously prove that for a hardware-efficientansatz initialized in the |0⟩⊗N state, our scheme avoids barren plateaus regardless of circuit depth,qubit count, or choice of cost function. Specifically, the lower bound on the initial gradient normprovided by our method remains independent of the number of qubits Building on thisfoundation, we validate our theoretical results through numerical experiments, includingvariational ground-state searches for Hamiltonians, to demonstrate the practical effectiveness ofour approach. Our findings highlight the critical role of Gaussian mixture model-basedinitialization in enhancing the trainability of quantum circuits and offer valuable guidance forfuture theoretical and experimental advances in quantum machine learning.Publication:New J. Phys. 27 (2025) 104501http://dx.doi.org/10.1088/1367-2630/ae0823Author:Xiao ShiInstitute of Mathematics, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, People’sRepublic of ChinaSchool of Mathematical Sciences, University of Chinese Academy of Sciences, Beijing 100049, People’s Republic of ChinaYun ShangInstitute of Mathematics, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, People’sRepublic of ChinaState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing,100190, People’s Republic of ChinaAuthor to whom any correspondence should be addressedE-mail: shangyun@amss.ac.cn
Variational quantum algorithms are among the most prominent methods in quantum computing,with applications in quantum machine learning, quantum simulation, and related fields. However,as the number of qubits grows, these algorithms often encounter the barren-plateau phenomenon,which severely limits their scalability. In this work, we introduce a novel parameter-initializationstrategy based on Gaussian mixture models. We rigorously prove that for a hardware-efficientansatz initialized in the |0⟩⊗N state, our scheme avoids barren plateaus regardless of circuit depth,qubit count, or choice of cost function. Specifically, the lower bound on the initial gradient normprovided by our method remains independent of the number of qubits Building on thisfoundation, we validate our theoretical results through numerical experiments, includingvariational ground-state searches for Hamiltonians, to demonstrate the practical effectiveness ofour approach. Our findings highlight the critical role of Gaussian mixture model-basedinitialization in enhancing the trainability of quantum circuits and offer valuable guidance forfuture theoretical and experimental advances in quantum machine learning.Publication:New J. Phys. 27 (2025) 104501http://dx.doi.org/10.1088/1367-2630/ae0823Author:Xiao ShiInstitute of Mathematics, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, People’sRepublic of ChinaSchool of Mathematical Sciences, University of Chinese Academy of Sciences, Beijing 100049, People’s Republic of ChinaYun ShangInstitute of Mathematics, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, People’sRepublic of ChinaState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing,100190, People’s Republic of ChinaAuthor to whom any correspondence should be addressedE-mail: shangyun@amss.ac.cn -
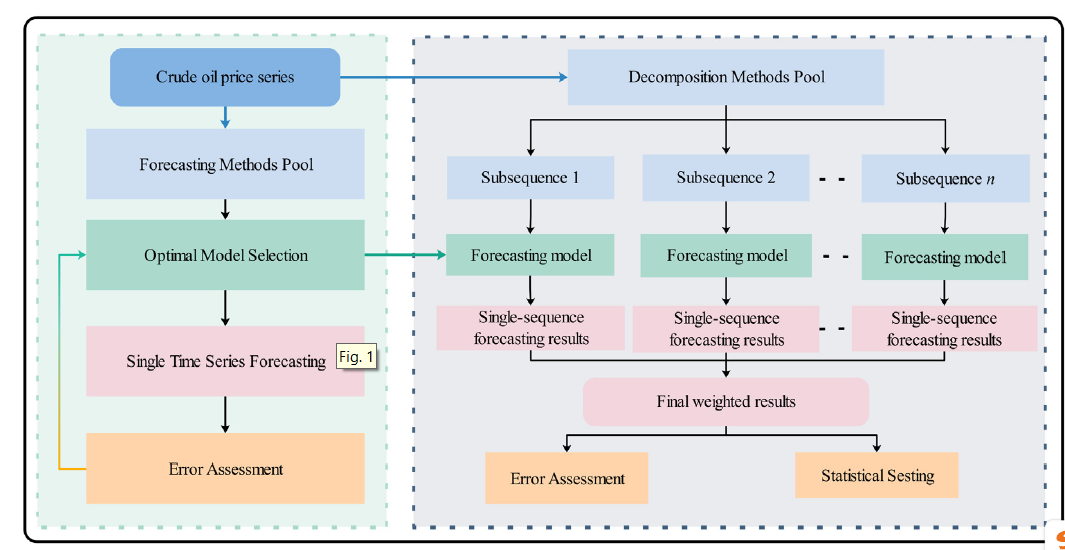
A comparative study of mode decomposition methods in crude oil forecasting (Yunjie Wei, Shouyang Wang)
05 21, 2026
Crude oil is of strategic importance in the world economy, and any change in its price affects economic stability, energy security, and even financial market performance. The high level of volatility in crude oil prices is influenced by geopolitical, economic, and speculative factors; it assigns both difficulties and necessities to the forecasting process. To address this, various forecasting models have been employed to capture the dynamics of oil price movements. Of these, the techniques of mode decomposition prove good in decomposing the complex price series into components to increase the accuracy of forecasting models, which perform the task of breaking down the price series into distinct components: the long-term trend, seasonal variation, and the stochastic short-term fluctuation. This study systematically evaluates and compares commonly used decomposition methods, highlighting the necessity of applying these techniques to enhance forecasting accuracy given the inherent complexity of crude oil prices. Through empirical tests, this study measures the effectiveness of these techniques, providing insights into their relative performance. The findings indicate that decomposition methods significantly enhance forecast accuracy and can be categorized into three tiers based on performance, offering guidance for selecting the most suitable approach for crude oil price forecasting.Publication:Energy EconomicsVolume 150, October 2025, 108853http://dx.doi.org/10.1016/j.eneco.2025.108853Author:Mingchen LiSchool of Economics and Management, China University of Mining and Technology, Xuzhou, 221116, ChinaE-mail addresses: limingchen@amss.ac.cnHaonan YaoState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaAcademy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaSchool of Mathematical Sciences, University of Chinese Academy of Sciences, Beijing, 100049, ChinaE-mail addresses: yaohaonan@amss.ac.cnShouyang WangState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaAcademy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaCenter for Forecasting Science, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaE-mail addresses: sywang@amss.ac.cnYunjie WeiState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaAcademy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaCenter for Forecasting Science, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing, 100190, ChinaCorresponding authorE-mail addresses: weiyunjie@amss.ac.cn -
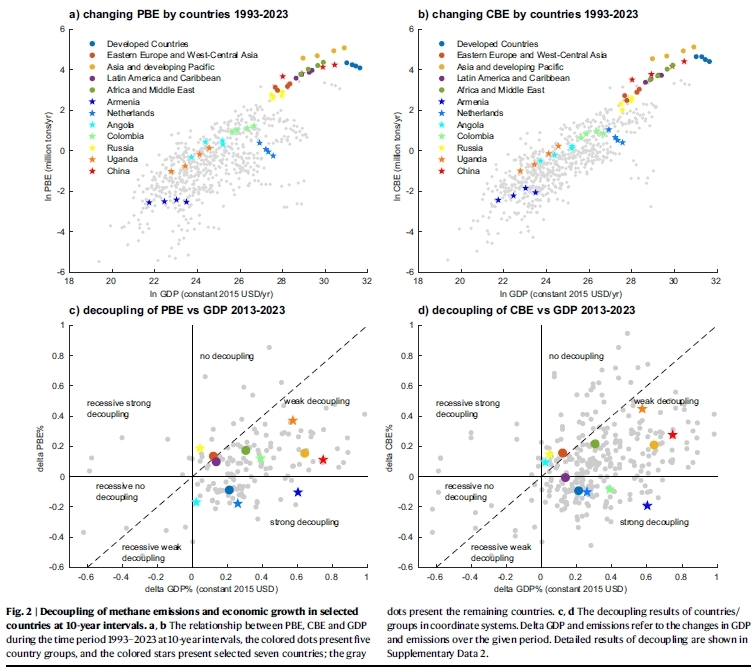 Methane has been identified as the second-largest contributor to climate change, accounting for approximately 30% of global warming. Countries have established targets and are implementing various measures to curb methane emissions. However, our understanding of the trends in methane emissions and their drivers remains limited, particularly from a consumption perspective (i.e. accounting for all emissions along the entire global supply chain). This study investigates the most recent dynamics of methane emissions across 120 sectors from both production and consumption viewpoints in 164 countries. It also discusses the status of decoupling of production- and consumption-based methane emissions from economic growth. Our results indicate that there is no foreseeable slowdown in the momentum of global methane emissions growth. Only a few developed countries have managed to reduce both production- and consumption-based emissions while maintaining economic growth (i.e., strong decoupling) during the observed period (1990-2023). Global trade accounts for approximately 30% of global methane emissions, but major trade patterns are shifting from North-North and North-South to South-South countries, reflecting the increasing participating of developing countries in global supply chains. The study further reveals the changing drivers of global methane emissions from 1998 to 2023 in five-year intervals. It identifies that the reduction in emission coefficient (i.e., emissions per unit of output), driven by advancements in improved energy efficiency and cleaner production technologies, is the main determinant for reducing emissions over the observation period, partly offsetting the increasing effects from growth of final demand. Changes in demand structure have played a considerable role in the increase of emissions since 2008. This study enhances our understanding of the changes and drivers of methane emissions and supports countries in incorporating methane emissions into their climate mitigation strategies.Publication:nature communicationshttps://doi.org/10.1038/s41467-025-63383-5Author:Yuli ShanSchool of Geography, Earth and Environmental Sciences, University of Birmingham, Birmingham B15 2TT, UKBirmingham Institute for Sustainability andClimate Action (BISCA), University of Birmingham, Birmingham B15 2TT, UKThese authors jointly supervised thiswork: Yuli Shan, Kailany.shan@bham.ac.ukKailan TianState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, ChinaDepartment of Land Economy, University of Cambridge, Cambridge CB2 1RX, UKThese authors jointly supervised thiswork: Yuli Shan, Kailank.tian@amss.ac.cnRuoqi LiSchool of Geography, Earth and Environmental Sciences, University of Birmingham, Birmingham B15 2TT, UKYuru Guan 1, Jiamin Ou6,Integrated Research on Energy, Environment and Society (IREES), Energy and Sustainability Research Institute Groningen, University of Groningen, Groningen 9747 AG, the NetherlandsDabo GuanDepartment of Earth System Science,Ministry of Education Key Laboratory for Earth System Modelling, Institute for Global Change Studies, Tsinghua University, Beijing 100084, ChinaThe Bartlett School of Sustainable Construction, University College London, London WC1E 6BT, UK.Klaus HubacekIntegrated Research on Energy, Environment and Society (IREES), Energy and Sustainability Research Institute Groningen, University of Groningen, Groningen 9747 AG, the NetherlandsThese authors jointly supervised thiswork: Yuli Shan, Kailank.hubacek@rug.nl
Methane has been identified as the second-largest contributor to climate change, accounting for approximately 30% of global warming. Countries have established targets and are implementing various measures to curb methane emissions. However, our understanding of the trends in methane emissions and their drivers remains limited, particularly from a consumption perspective (i.e. accounting for all emissions along the entire global supply chain). This study investigates the most recent dynamics of methane emissions across 120 sectors from both production and consumption viewpoints in 164 countries. It also discusses the status of decoupling of production- and consumption-based methane emissions from economic growth. Our results indicate that there is no foreseeable slowdown in the momentum of global methane emissions growth. Only a few developed countries have managed to reduce both production- and consumption-based emissions while maintaining economic growth (i.e., strong decoupling) during the observed period (1990-2023). Global trade accounts for approximately 30% of global methane emissions, but major trade patterns are shifting from North-North and North-South to South-South countries, reflecting the increasing participating of developing countries in global supply chains. The study further reveals the changing drivers of global methane emissions from 1998 to 2023 in five-year intervals. It identifies that the reduction in emission coefficient (i.e., emissions per unit of output), driven by advancements in improved energy efficiency and cleaner production technologies, is the main determinant for reducing emissions over the observation period, partly offsetting the increasing effects from growth of final demand. Changes in demand structure have played a considerable role in the increase of emissions since 2008. This study enhances our understanding of the changes and drivers of methane emissions and supports countries in incorporating methane emissions into their climate mitigation strategies.Publication:nature communicationshttps://doi.org/10.1038/s41467-025-63383-5Author:Yuli ShanSchool of Geography, Earth and Environmental Sciences, University of Birmingham, Birmingham B15 2TT, UKBirmingham Institute for Sustainability andClimate Action (BISCA), University of Birmingham, Birmingham B15 2TT, UKThese authors jointly supervised thiswork: Yuli Shan, Kailany.shan@bham.ac.ukKailan TianState Key Laboratory of Mathematical Sciences, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, Beijing 100190, ChinaDepartment of Land Economy, University of Cambridge, Cambridge CB2 1RX, UKThese authors jointly supervised thiswork: Yuli Shan, Kailank.tian@amss.ac.cnRuoqi LiSchool of Geography, Earth and Environmental Sciences, University of Birmingham, Birmingham B15 2TT, UKYuru Guan 1, Jiamin Ou6,Integrated Research on Energy, Environment and Society (IREES), Energy and Sustainability Research Institute Groningen, University of Groningen, Groningen 9747 AG, the NetherlandsDabo GuanDepartment of Earth System Science,Ministry of Education Key Laboratory for Earth System Modelling, Institute for Global Change Studies, Tsinghua University, Beijing 100084, ChinaThe Bartlett School of Sustainable Construction, University College London, London WC1E 6BT, UK.Klaus HubacekIntegrated Research on Energy, Environment and Society (IREES), Energy and Sustainability Research Institute Groningen, University of Groningen, Groningen 9747 AG, the NetherlandsThese authors jointly supervised thiswork: Yuli Shan, Kailank.hubacek@rug.nl -
A natural deep Ritz method for essential boundary value problems (Haijun Yu, Shuo Zhang)
05 20, 2026
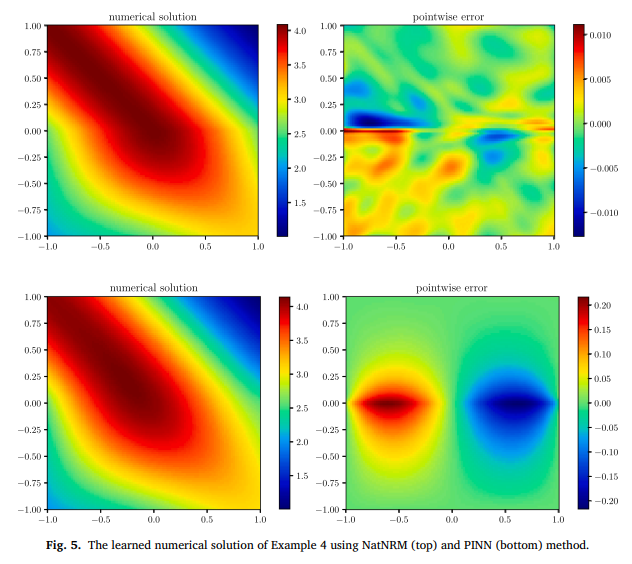
Deep neural network approaches show promise in solving partial differential equations. However, unlike traditional numerical methods, they face challenges in enforcing essential boundary conditions. The widely adopted penalty-type methods, for example, offer a straightforward implementation but introduces additional complexity due to the need for hyper-parameter tuning; moreover, the use of a large penalty parameter can lead to artificial extra stiffness, complicating the optimization process. In this paper, we propose a novel, intrinsic approach to impose essential boundary conditions through a framework inspired by intrinsic structures. We demonstrate the effectiveness of this approach using the deep Ritz method applied to Poisson problems, with the potential for extension to more general equations and other deep learning techniques. Numerical results are provided to substantiate the efficiency and robustness of the proposed method. Publication:Journal of Computational Physics Volume 537, September 2025https://doi.org/10.1016/j.jcp.2025.114133 Author:Haijun YuState Key Laboratory of Mathematical Sciences (SKLMS) and State Key Laboratory of Scientific and Engineering Computing (LSEC), Institute of Computational Mathematics and Scientific/Engineering Computing, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, 100190, Beijing, China b School of Mathematical Sciences, University of Chinese Academy of Sciences, 100049, Beijing, ChinaE-mail: hyu@lsec.cc.ac.cn (H. Yu) Shuo Zhang(Corresponding author)State Key Laboratory of Mathematical Sciences (SKLMS) and State Key Laboratory of Scientific and Engineering Computing (LSEC), Institute of Computational Mathematics and Scientific/Engineering Computing, Academy of Mathematics and Systems Science, Chinese Academy of Sciences, 100190, Beijing, China b School of Mathematical Sciences, University of Chinese Academy of Sciences, 100049, Beijing, ChinaE-mail: szhang@lsec.cc.ac.cn (S. Zhang)
Copyright@2008,All Rights Reserved, Academy of Mathematics and Systems Science,CAS
Tel:86-10-82541777 Fax: 86-10-82541972 E-mail: contact@amss.ac.cn
京ICP备05002806-1号 京公网安备110402500020号






